 Вольтик
Вольтик
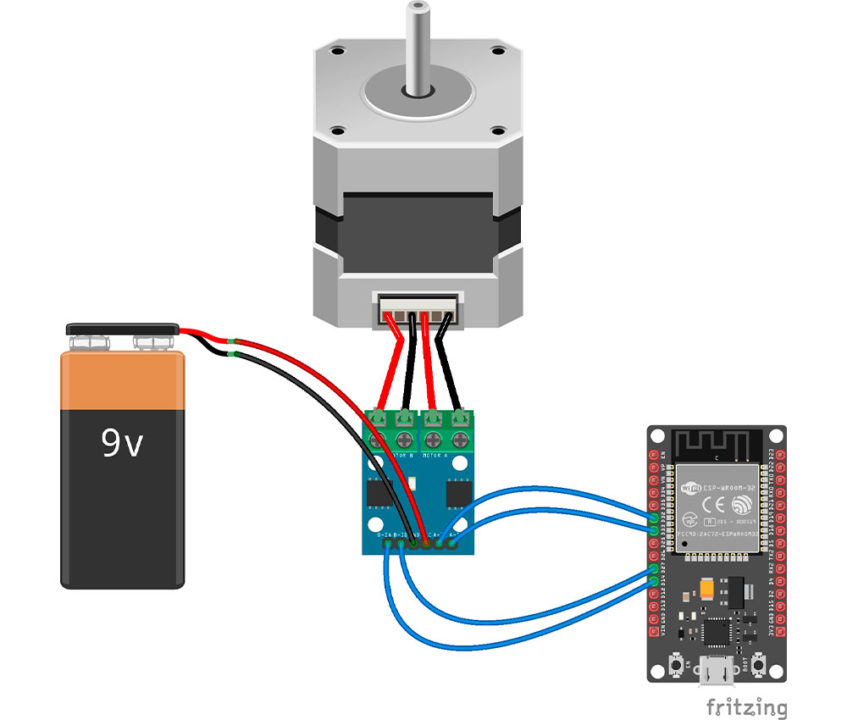
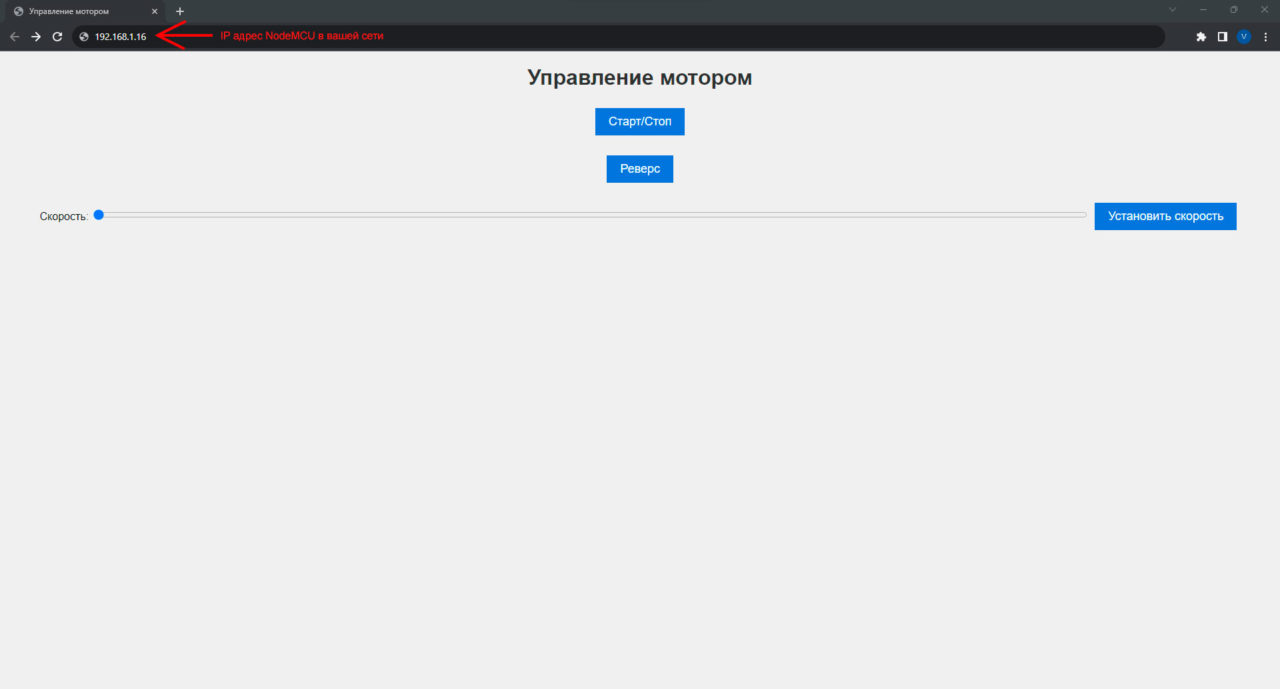
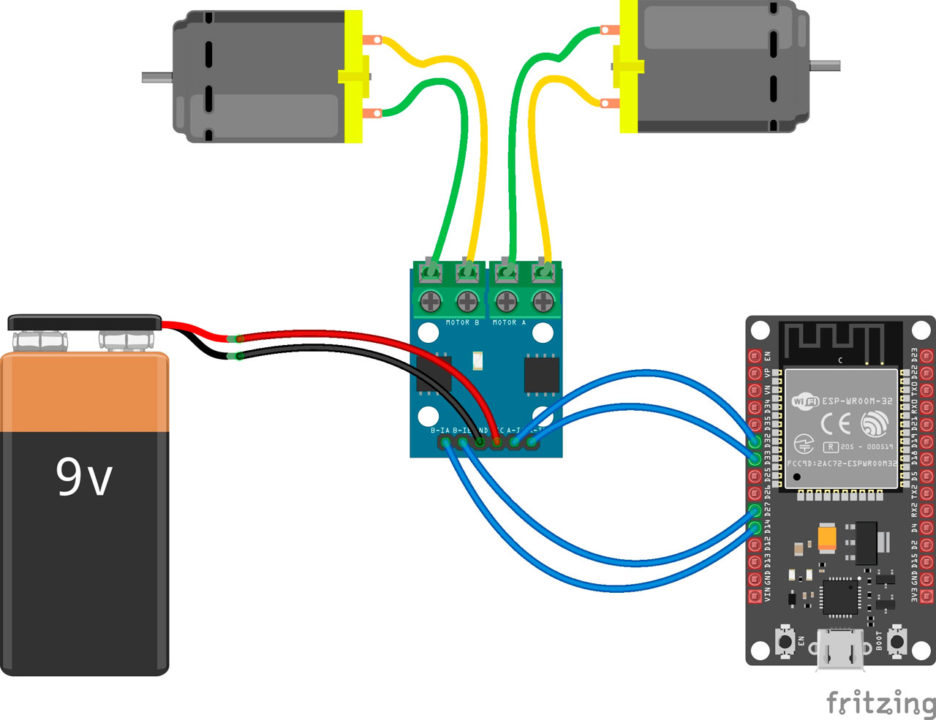
Мир микроэлектроники и DIY проекты предоставляют бесконечные возможности для творчества и экспериментов. В данной статье мы рассмотрим, как подключить шаговый двигатель и два коллекторных мотора постоянного тока к популярному микроконтроллеру NodeMCU-32S с использованием драйвера H-моста L9110. Это отличный способ добавить движение в ваши проекты и создать интерактивные устройства с управлением через веб-интерфейс.

2 комментария. Оставить новый
привет ,1 есть ардуино, дисплей от часов ТМ1637 с I2C на борту ,запустил тест цифр , всё работает,
2 есть ардуино, двухстрочный дисплей LCD1602 c 12c адаптером адрес 0x27
вгрузил контроллер поворотки R3NG всё заработало,с одним но, цифирки маловаты.
помогите совместить: ардуино, дисплей от часов ТМ1637 , и программу K3NG контроллер поворотки? слеповат Я, и долго разбираться с кодами и скетчами неьогу физически, помогите , буду очень благодарен Сергей.
Здравствуйте. Напишите здесь, в комментариях, подробное ТЗ по логике работы, попробуем помочь в свободное время.