Вольтик
Вольтик
Шаговый двигатель – это бесщеточный двигатель постоянного тока, который может вращаться на малые углы, называемые шагами. Обычно шаговый двигатель использует 200 шагов для полного оборота на 360 градусов, что означает вращение на 1,8 градуса за шаг. Шаговые двигатели применяются во многих устройствах, требующих точного вращения, таких как роботы, антенны, жесткие диски и т.д. Мы можем вращать шаговой двигатель на определенный угол, предоставив ему соответствующие инструкции. В основном существует два типа шаговых двигателей: униполярные и биполярные. Униполярные более просты в управлении.
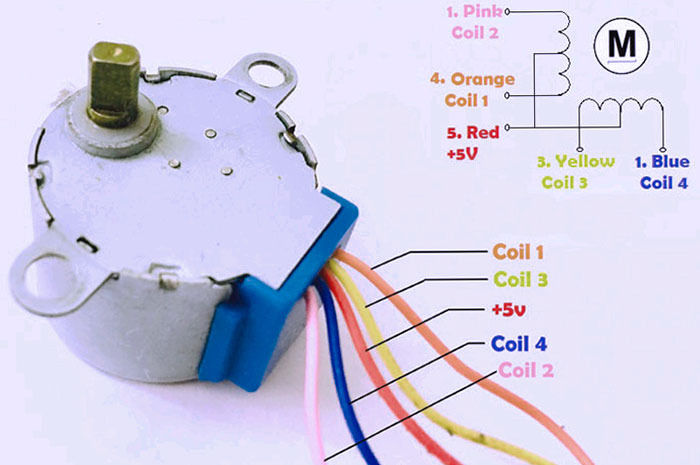
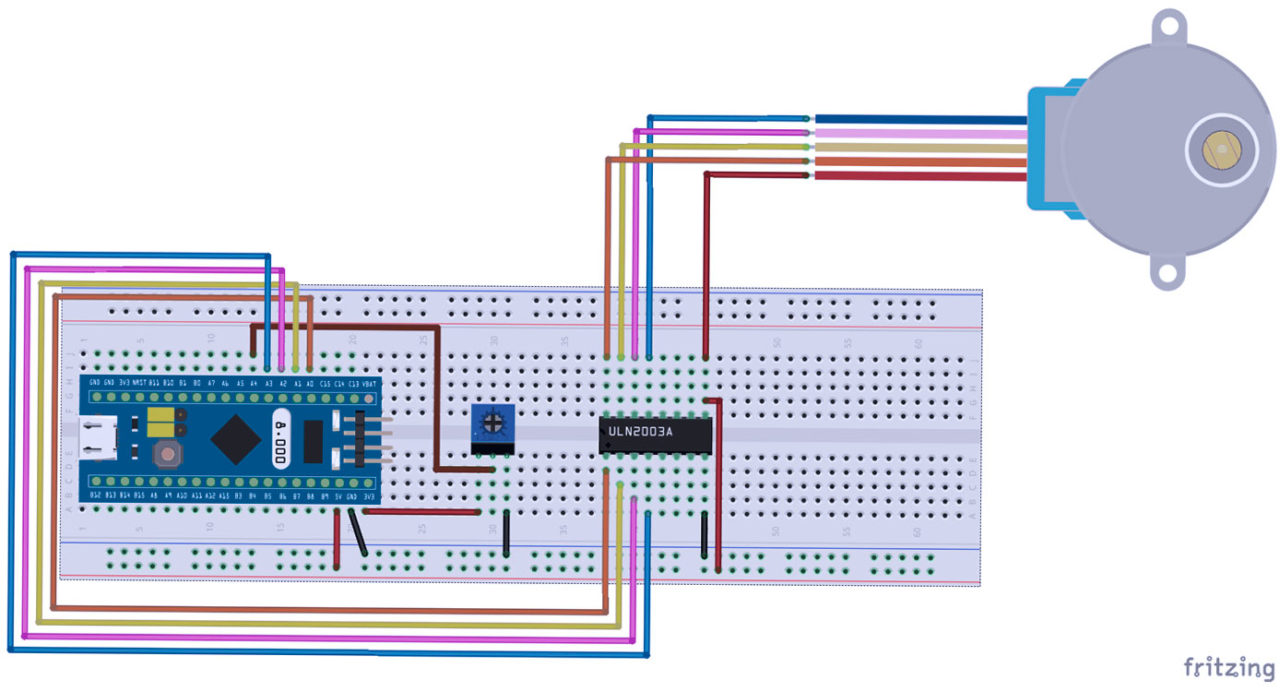
Мы будем использовать шаговый двигатель 28BYJ-48. Это униполярный шаговый двигатель, который требует питания от 5 В. Двигатель имеет 4 катушки с устройством униполярного типа, и каждая катушка имеет напряжение +5 В, поэтому его относительно легко управлять любыми микроконтроллерами, такими как Arduino, Raspberry Pi или отладочными платами STM32, купить которые можно в нашем магазине.
Однако, для управления шаговым двигателем потребуется моторный драйвер, такой как ULN2003, потому что двигатели потребляют высокий ток, и это может повредить микроконтроллеры.
Еще одной важной характеристикой является угол шага: 5,625°/64. Это означает, что двигатель при работе в последовательности из 8 шагов будет перемещаться на 5,625 градуса для каждого шага, и ему потребуется 64 шага (5,625*64=360), чтобы совершить полный оборот. Другие характеристики из документации предоставлены ниже: