 Вольтик
Вольтик
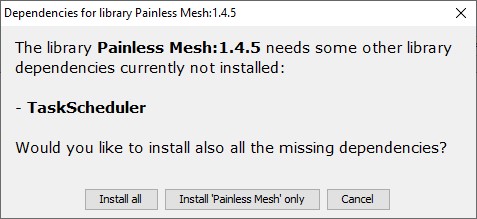
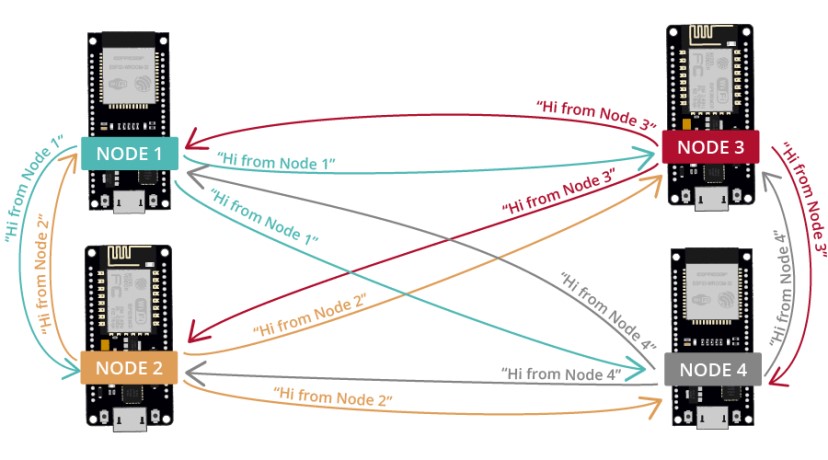
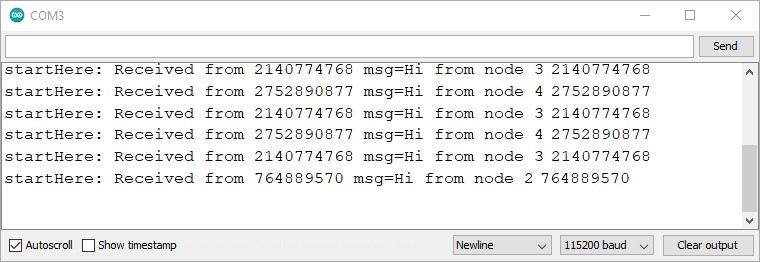
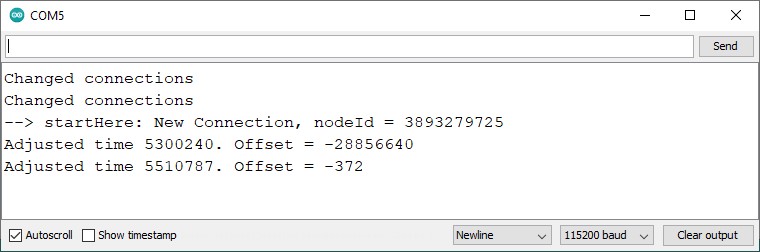
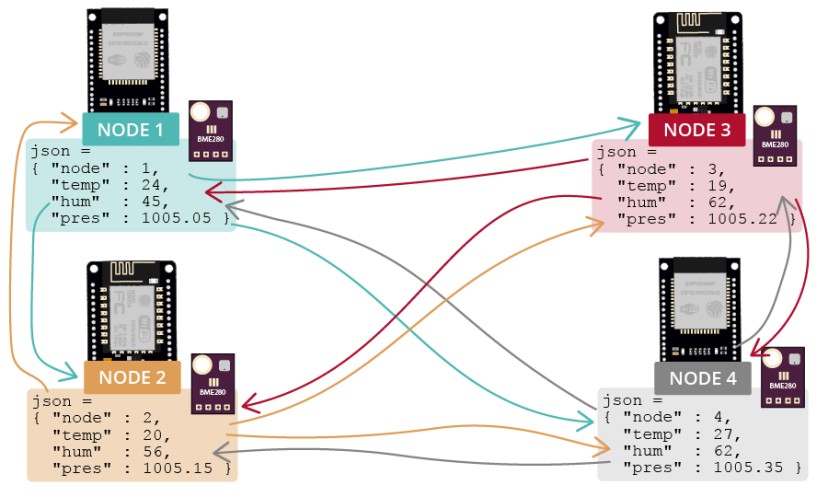
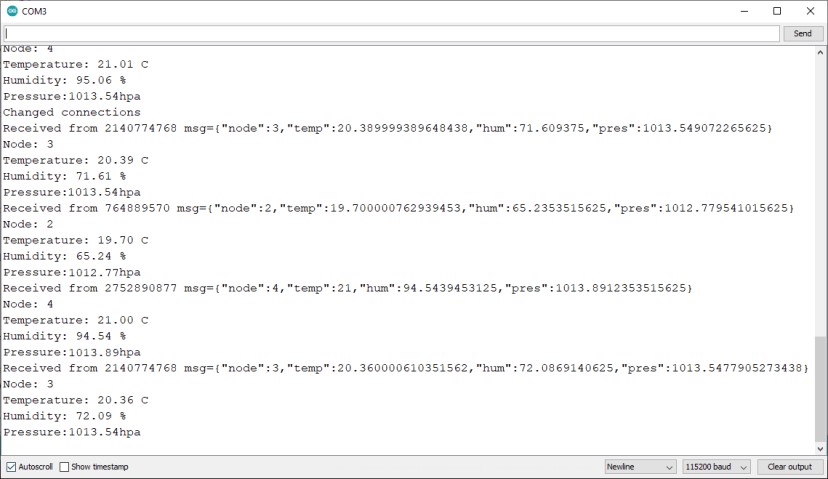
В данном руководстве рассмотрим, как работает сетевой протокол ESP-MESH для построения ячеистой топологии на платах ESP32 и ESP8266 NodeMCU. ESP-MESH позволяет нескольким устройствам (нодам) связываться друг с другом в одной беспроводной локальной сети. В этом руководстве мы покажем вам, как работать с ESP-MESH с использованием среды Arduino.

4 комментария. Оставить новый
А как еще и подключить их к роутеру одновременно?
А зачем их к роутеру одновременно подключать?
Стас, привет ! Работаешь с МESH сетями ? Меня заинтересовала Твоя библиотека, которая недоступна в GetHab
Слишком нестабильная библиотека. Есть лучше. https://github.com/aZholtikov/ZHMeshNetwork.