 Вольтик
Вольтик
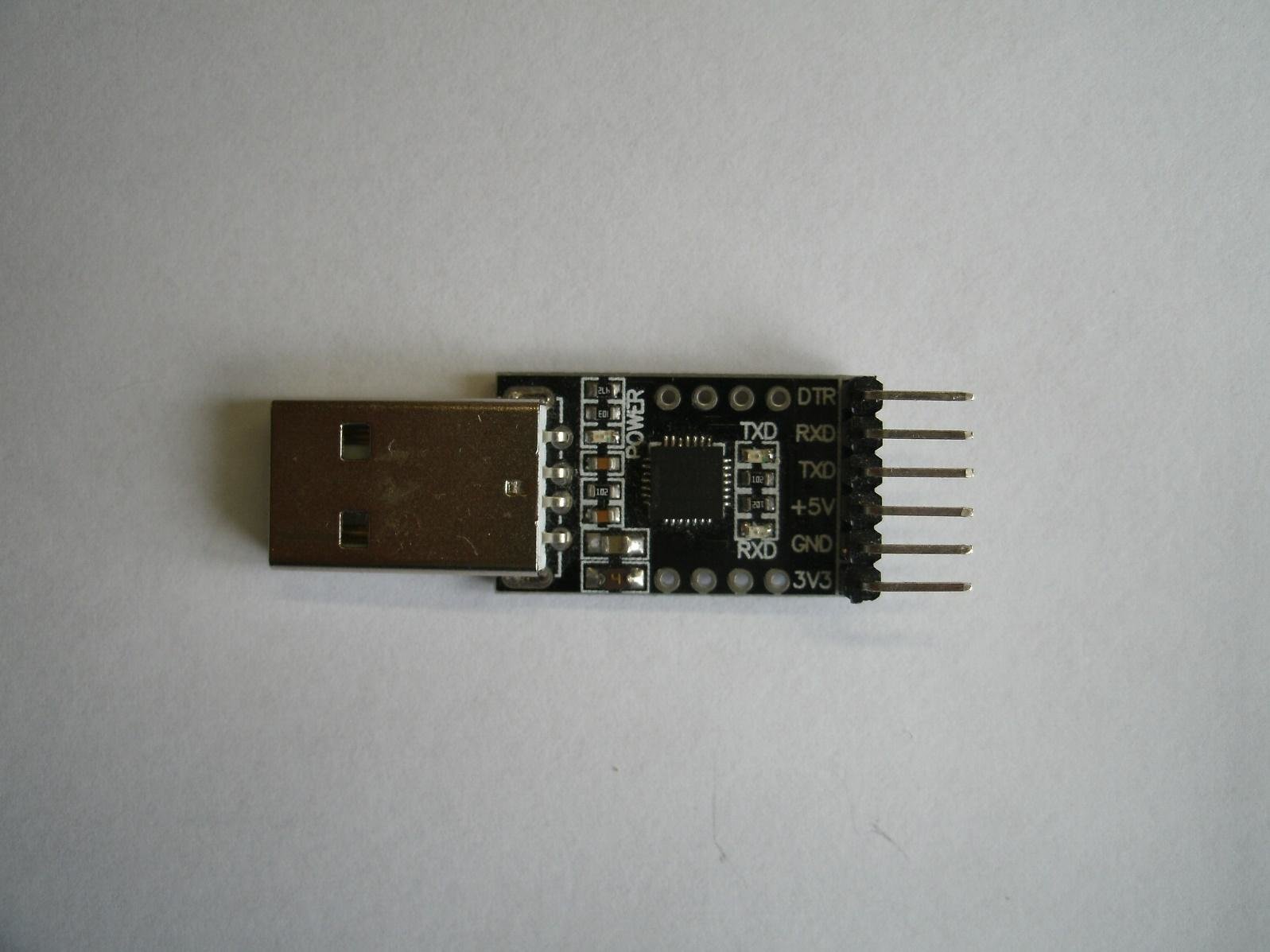
Интерфейс UART – один из первых внешних компьютерных интерфейсов, который использовался уже в первых самосборных компьютерах в виде COM-порта (RS232, используется до сих пор). Было бы странно, если бы PADI не имел хотя бы одного такого интерфейса, а он имеет целых 3! О работе с ними мы сегодня и поговорим.












1 комментарий. Оставить новый
а программа где?