Вольтик
Вольтик
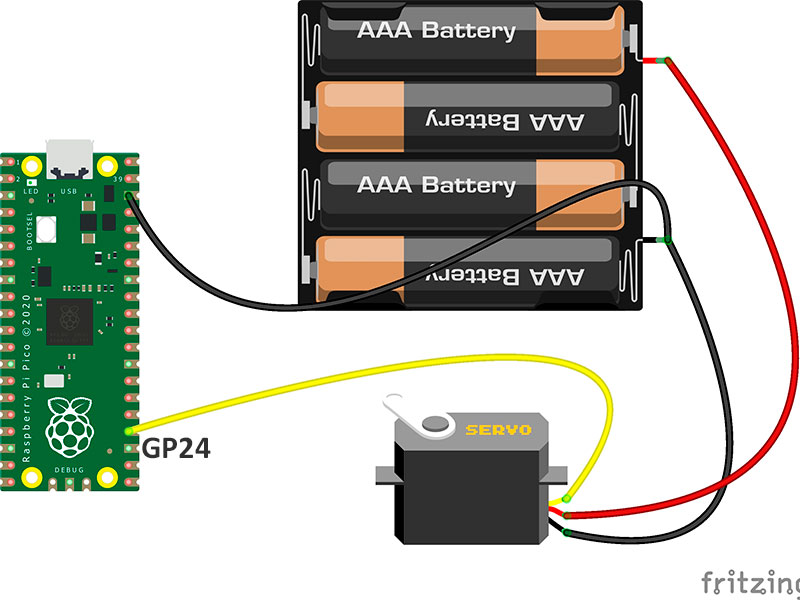
В этой статье мы рассмотрим, как подключить и использовать сервопривод с микроконтроллером Raspberry Pi Pico (RP2040). Сервоприводы широко используются в робототехнике, моделировании и других проектах, где требуется точное управление углом поворота. Raspberry Pi Pico, благодаря своим характеристикам и доступной цене, становится отличной платформой для управления такими устройствами.